
Ultra-wideband keeps coming up in indoor positioning discussions because it is the technology that finally broke past the few-metres accuracy ceiling that Wi-Fi and Bluetooth methods tend to hit indoors. If you have read that UWB can locate something to within a hand's width, that is real, and this post explains why it works, what it costs to deploy, and the use cases where that precision earns its keep versus the ones where it is more than the job needs.
This is a neutral explainer. It goes deep on UWB itself rather than surveying every method; for a one-line-per-technology overview of the field, see the piece on how positioning methods compare. Ariadne does not use UWB, and this post does not present it as a UWB product. Near the end there is a short section on Ariadne's different, camera-free and tag-free approach, clearly framed as an alternative sensing philosophy rather than a competing ultra-wideband system.
How does UWB indoor positioning work?
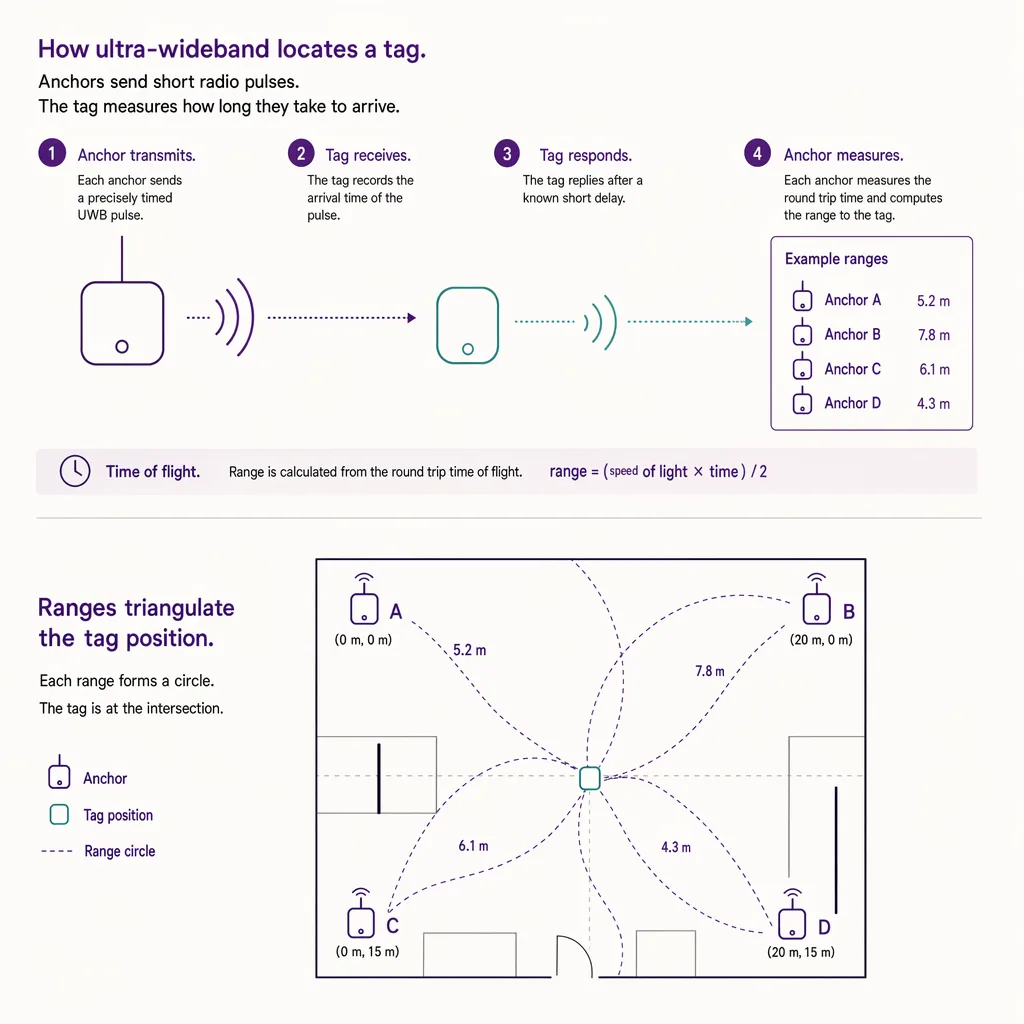
Ultra-wideband (UWB) positioning locates a tag by measuring how long a very short radio pulse takes to travel between the tag and fixed anchors mounted around a space. Because UWB uses a wide frequency band and precise timing, it can resolve distance to within tens of centimetres, which is far tighter than Wi-Fi or Bluetooth trilateration. The trade-off is infrastructure: you install anchors throughout the building and attach a UWB tag to each thing or person you want to locate. That makes UWB a strong fit for high-precision asset tracking, and often more than a visitor-flow use case needs.
The sections below unpack the physics that make that precision possible, the deployment that precision costs, and the honest question of where it is worth it.
Time-of-flight ranging, TDoA, and why the wide band matters
UWB measures distance by timing a signal, not by reading its strength. A UWB tag and a UWB anchor exchange very short radio pulses, and the system measures the time of flight between them. Because radio travels at a known speed, a precise time measurement converts directly into a precise distance. Measure the distance from a tag to several fixed anchors and you can compute the tag's position by trilateration.
There are two common timing schemes. Two-way ranging has the tag and anchor exchange messages so the round-trip time can be measured directly. Time difference of arrival, or TDoA, has the tag transmit once and compares when that single pulse arrives at several tightly synchronized anchors; the differences in arrival time fix the position. TDoA scales better to many tags because each tag transmits rather than holding a conversation with every anchor, at the cost of needing the anchors kept in tight time sync.
The wide band is the reason any of this reaches decimetre precision. A signal spread across a very wide frequency range has an extremely short pulse in time, and a short pulse can be timed sharply. It also helps UWB separate the first, direct-path pulse from its later reflections off walls and floors, which is exactly the multipath problem that degrades signal-strength methods like Wi-Fi and Bluetooth. Timing a sharp pulse is inherently more precise than estimating distance from how loud a signal is, which is why UWB sits at the accurate end of the radio-positioning field.
What a UWB deployment needs: anchors, tags, synchronization, and cost
Precision on this level is bought with infrastructure, and this is where UWB's trade-off becomes concrete.
A UWB system needs fixed anchors mounted throughout the covered area, typically several within range of any point you want to locate, because trilateration needs multiple distance measurements. Those anchors need power and a network path back to a positioning server, and for TDoA they need to be kept in tight time synchronization with each other, which adds cabling or a synchronization scheme to the install. Coverage is a design exercise: the number and placement of anchors drives both accuracy and cost, and larger or more complex spaces need more of them.
On the moving side, every object or person you want to locate carries a UWB tag. That is the defining constraint of the technology: UWB locates tags, not untagged people. For asset tracking that is natural, because you are tagging equipment anyway. For locating visitors it means handing out or embedding a device, which is often impractical at the scale of a public venue.
Costs vary widely by vendor, scale, and how much accuracy and update rate a deployment demands, so treat any single figure with caution and price a real design rather than a rule of thumb. Directionally, UWB carries a higher per-area infrastructure cost than a signal-strength method because of the anchor density and synchronization it needs, plus a recurring per-unit cost for tags and their batteries. The right way to compare is total cost against the accuracy a use case actually requires, not headline hardware price.
UWB accuracy vs Wi-Fi, Bluetooth, and other radio methods
The table below places UWB against the radio methods it is usually weighed against. Accuracy figures describe each technology's generally documented capability under good conditions, not a guaranteed result in every building, and real deployments land inside these ranges depending on design and environment. For a fuller treatment of what accuracy claims actually mean in practice, see what indoor accuracy really means.
| Method | How it locates | Typical accuracy | Infrastructure | Tag on the person or asset? | Typical use |
|---|---|---|---|---|---|
| UWB | Time-of-flight ranging, precise timing | Tens of centimetres | Dense anchors, tight synchronization | Yes, a UWB tag | High-precision asset tracking, RTLS |
| Bluetooth (BLE beacons) | Signal-strength proximity and trilateration | A few metres | Beacons, low power | Yes, a phone or tag | Proximity, zone presence, low-cost rollouts |
| Wi-Fi | Signal-strength trilateration or fingerprinting | Several metres | Reuses existing access points | Device with Wi-Fi | Coarse location, using existing network |
| Inertial (phone sensors) | Dead reckoning from motion sensors | Drifts over time without correction | None fixed, runs on the phone | The user's own phone | Short-range assist, fused with other methods |
The pattern is consistent: precision and infrastructure rise together, and every radio method in the table locates a device that a person or asset is carrying. That last column is the one that decides many projects. For a direct head-to-head on the two most-compared options, the sibling post on UWB against Bluetooth beacons runs the decision in detail.
Where UWB fits and where it is overkill
UWB earns its cost when a few metres of error is genuinely unacceptable and the things being located are already tagged. Tracking tools, stock, vehicles, or equipment across a warehouse or hospital, knowing which bay a forklift is in, following a specific asset through a process: these are the real-time location system (RTLS) cases where decimetre accuracy changes what you can do, and where tagging the asset is normal rather than intrusive.
It is overkill when the question is anonymous visitor flow. Understanding how crowds move through a mall, an airport, or a museum rarely needs to know that one person is 20 centimetres left of another, and it certainly does not justify handing every visitor a tag. For flow, dwell, and route analysis at venue scale, the infrastructure and per-tag cost of UWB buy precision the use case cannot spend, while the tag requirement makes it impractical for the general public in the first place. Matching the method to the question, rather than buying the most precise option available, is the whole discipline here.
A different approach: camera-free, tag-free visitor positioning
For the anonymous visitor-flow case specifically, Ariadne takes a different route from UWB. It does not use ultra-wideband, anchors, or tags on people, and it is not a UWB product. Its aim is to understand how visitors move through a space without identifying anyone and without asking anyone to carry a device, which is a different problem from tracking a tagged asset to the centimetre.
Ariadne measures this with Hybrid Fusion, its patented camera-free method. Time-of-Flight depth sensing counts every visitor at the entrances, capturing geometry rather than images, while patented phone signal sensing follows movement through the interior, detecting the signals a phone emits even in airplane mode, and tracks that movement to about one-metre precision. The sensor streams both feeds to Ariadne, where Hybrid Fusion combines them into one trajectory per visit and computes counts, dwell, and paths. The streams carry no identifier: no MAC address, no device ID, no biometric data, and no camera is involved. Identifiers are stored only when a visitor explicitly opts in, which keeps the method GDPR-friendly and outside biometric territory.
The contrast is one of purpose. UWB locates a tagged thing to decimetres; Ariadne describes untagged visitor flow to about one metre without collecting personal data, which is a design choice about positioning without tracking people. Neither replaces the other. If your problem is asset RTLS, UWB is built for it. If your problem is anonymous flow across a public venue, a camera-free and tag-free method fits the question better. For that side of the field, see camera-free indoor navigation and the broader indoor wayfinding overview.
FAQ
How accurate is UWB indoor positioning?
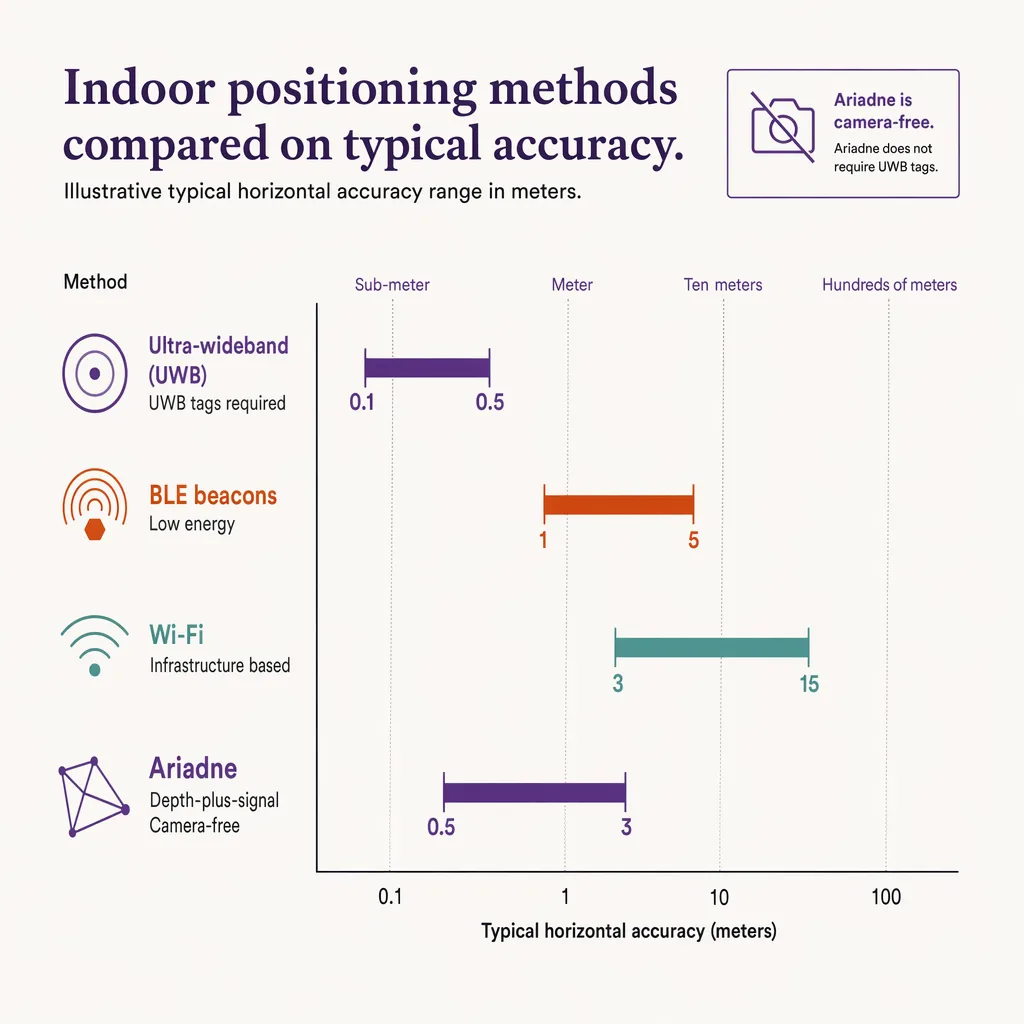
Under good conditions UWB generally resolves position to within tens of centimetres, tighter than Wi-Fi or Bluetooth signal-strength methods, which usually land at several metres and a few metres respectively. Real accuracy depends on anchor density, synchronization, and the environment, so treat decimetre figures as the technology's documented capability rather than a guarantee in every building.
Does UWB positioning require tags?
Yes. UWB locates a UWB tag by timing radio pulses between the tag and fixed anchors, so every object or person you want to locate must carry a tag. That suits asset tracking, where equipment is tagged anyway, and is often impractical for locating the general public at a venue.
Is UWB better than Bluetooth for indoor positioning?
For accuracy, yes: UWB reaches tens of centimetres against Bluetooth's few metres. But UWB costs more in anchors and synchronization and still needs a tag. Bluetooth suits proximity, zone-level presence, and low-cost rollouts; UWB suits high-precision asset tracking. The better choice depends on the required accuracy and budget, not on one being superior overall.
Does Ariadne use UWB?
No. Ariadne uses Hybrid Fusion, a camera-free method combining Time-of-Flight depth sensing with patented phone signal sensing, and it places no tag on people. It is built for anonymous visitor flow at about one-metre precision rather than for tagged-asset tracking, which is the case UWB is designed for.
Do I need cameras for indoor positioning?
No. Ariadne counts with Hybrid Fusion: Time-of-Flight depth sensing plus patented phone signal sensing, never cameras. Time-of-Flight captures geometry rather than images, and signal sensing captures no MAC address by default, so the measurement involves no video, no faces, and no biometric data.


